
Elegir la configuración de motores más efectiva para tu próxima construcción de un dron de carreras.
Nos vamos a centrar en los motores sin escobillas. Los motores con escobillas, propios de drones poco potentes y aparatos de calidad juguete, son más sencillos de entender: reciben corriente directa y su velocidad de giro es proporcional al voltaje al que son alimentados, y, obviamente, cuanto más grandes, son más potentes. Cómo de rápido giran, o cuanto par generan ya son temas de diseño y eficiencia. Un asunto que merece la pena mencionar es que este tipo de motores tiene un sentido de giro predeterminado, y debido a que hay piezas sometidas a desgaste (las escobillas), suelen tener un ciclo de vida corto.
Los motores sin escobillas, por el contrario, necesitan un tren de pulsos de corriente generado en sincronía para excitar sus bobinas de una forma concreta y hacerlos girar. Cómo puedes ver, son muy distintos.
Tamaño del chasis
Lo primero de todo es que tienes que conocer el tamaño del chasis. Esto determinará que hélices y qué motores podrás utilizar en tu cuadracóptero.
Peso total del aparato
Puedes estimar cual es el peso total del aparato una vez hayas seleccionado todos los componentes. Deberías incluir todo lo que piensas incluir a bordo: al chasis, FC, PDB, RX, VTX, antena FPV, motores, hélices, ESCs, la batería, carga adicional como la GoPro, etc. Añade 10 o 20 gramos para compensar por los cables, el buzzer, las corbatas plásticas, etc. Probablemente no te acerques con gran precisión al peso real del aparato pero es mejor sobrestimar el peso y tener un poco de potencia extra que infravalorarlo y no ser capaz de volar.
Requerimientos de Empuje
Una vez sabes cuanto va a pesar el quad, y el tamaño del cuadro, ahora puedes calcular aproximadamente cuanto empuje necesitan generar la combinación de motores / hélices para hacer volar el aparato. Ya veo que vas a necesitar saber más de hélices.
Como regla general, el empuje generado debería ser como mínimo el doble del peso del quad. Éste es el mínimo absoluto para tener un dron que sea maniobrable mientras flota estático. Si el empuje proporcionado por los motores es demasiado pequeño, el quad no responderá bien a los controles y puede incluso llegar a tener dificultades para despegar.
 Por ejemplo, si tenemos un cuadracóptero que pesa 1 Kg, el empuje total generado por los motores al 100% debería ser como mínimo de 2 Kg, o 500 gramos por motor (para un cuadracóptero). Por supuesto que siempre es agradable tener algo más de lo que estrictamente necesitas…
Por ejemplo, si tenemos un cuadracóptero que pesa 1 Kg, el empuje total generado por los motores al 100% debería ser como mínimo de 2 Kg, o 500 gramos por motor (para un cuadracóptero). Por supuesto que siempre es agradable tener algo más de lo que estrictamente necesitas…
El tamaño de los motores sin escobillas está normalmente indicado con un número de 4 dígitos, AABB. Los dos primeros, AA, dicen el diámetro del estátor, mientras que BB dicen la altura del estátor, ambas en mm.
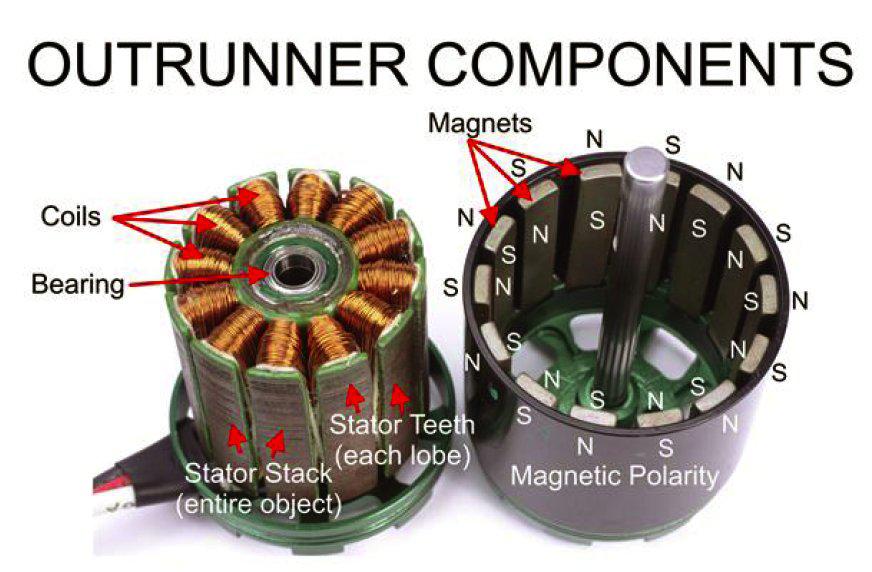
Pero que es un estátor en un motor sin escobillas? El estátor es la parte estacionaria del motor, o dicho en cristiano, lo que no se mueve, mientras que el rotor es lo que sí se mueve. El estátor tiene unos “polos” que son unos núcleos metálicos rodeados por bobinas de cobre. Los núcleos están compuestos por muchas láminas metálicas muy delgadas juntas con aislante entre ellas.
- Cuanto más alto el estátor, mas RPMs
- Cuanto mayor diámetro tiene el estátor, mayor par generado a menos RPMs
Incrementando el tamaño del motor, bien en altura o bien en diámetro se incrementan el tamaño de los imanes permanentes del rotor y también el tamaño de las bobinas del estátor. En cualquier caso, al incrementar la altura crece el tamaño de los imanes permanentes más que el tamaño de las bobinas, y al incrementar el diámetro crece el tamaño de las bobinas más que el de los imanes permanentes.
El tamaño de las hélices para las que un motor ha sido diseñado determinan el tamaño del eje. Los motores para hélices de 3”, 4”, 5” y 6” todos tienen ejes de 5 mm de diámetro. Los motores más modernos tienen el eje de la hélice integrado en la campana del motor, mientras que los motores más viejos puede que vayan con adaptadores separados.
KV es la constante de velocidad. Comúnmente se traduce como “miles de RPM por cada voltio”. Es un parámetro importante en un motor sin escobillas e indica el (teórico) incremento de RPMs del motor (sin ninguna carga, como una hélice) cuando el voltaje sube un voltio. Por ejemplo, dando potencia a un motor de 2300KV con una batería LiPo 3S (de 12.6 V), el motor girará a alrededor de 28980 RPM sin las hélices (2300 x 12.6 = 28980). Esto típicamente es el redondeo que hace el fabricante en sus especificaciones.
Una vez que se le monta la hélice al motor, las RPM caen drásticamente debido a la resistencia del aire. Los motores con KVs más elevados intentan girar la hélice más rápido, pero los motores con KVs más bajos suelen generar mayor par motor. Por esto es por lo que se suelen ver las hélices más grandes junto a motores con bajo KV porque hace falta más par para girar una hélice grande, y al revés: hélices pequeñas y ligeras con motores diseñados para altas velocidades.
El valor KV de un motor puede estar determinado por el número de vueltas de hilo de cobre que tienen las bobinas del estátor. En general, con muchas vueltas, el KV del motor baja, mientras que menos vueltas de hilo de cobre incrementan el KV del motor.
La fuerza magnética de los imanes también afectan el KV del motor. Los imanes potentes elevan el KV.
Si emparejamos motores con KV elevado y hélices demasiado grandes, el motor intentará girar rápido como lo haría si tuviera acoplada una hélice más pequeña, pero esto requiere más par motor. A medida que el motor intenta producir el par motor necesario extraerá más corriente y consecuentemente generará más calor, pudiendo ser éste demasiado y acabar quemando el motor. Cuando el motor se sobre calienta mucho, el recubrimiento de los cables se funde y se producen cortocircuitos.
Tamaño del chasis=> Tamaño de las hélices => Tamaño del motor
Conociendo el tamaño del chasis, podemos estimar que tamaño de motores debemos usar. El tamaño del chasis limita el tamaño de las hélices y cada hélice requiere diferentes RPM para generar el par eficientemente. Ahí es donde el KV del motor entra en juego.
Debes asegurarte también que los motores generan suficiente par motor para girar las hélices que has seleccionado, y ahí es donde el tamaño del estátor entra en juego. Generalmente, cuanto mayor es el tamaño del estátor y mayor es el KV, hace falta más corriente para girar el motor.
La tabla que sigue, compilada por Oscar Liang, es una guía general, no debes tomarla como si estuviese escrita en piedra. Hay mucha gente que utiliza motores con KV algo mayor o algo menor de lo sugerido en esta tabla. Se parte de la base de que estás alimentando los motores con baterías LiPo 4S, y el tamaño del cuadro se refiere a la distancia entre ejes de motores en diagonal.
| Tamaño del chasis | Tamaño de Hélices | Tamaño del Motor | KV |
|
150mm o menor |
3″ o menor |
1105 -1306 o menor |
3000KV o más |
|
180mm |
4″ |
1806 |
2600KV – 3000KV |
|
210mm |
5″ |
2204-2208, 2306 |
2300KV-2600KV |
|
250mm |
6″ |
2204-2208, 2306 |
2000KV-2300KV |
|
350mm |
7″ |
2208 |
1600KV |
|
450mm |
8″, 9″, 10″ o mayor |
2212 o mayor |
1000KV o menos |
En el cuadro se puede entender cómo es la tendencia y cual es la lógica que sigue. Cuanto mayor es el cuadracóptero, más grandes y pesadas serán las hélices. Los motores necesarios deberán por tanto ser capaces de proporcionar mucho par motor. Igualmente, cuanto menor es el aparato, menor será la capacidad de carga, por lo que la batería será más pequeña (1S ó 2S), esto implica menos voltaje y por lo tanto motores con mayor KV.
Es importante entender que el voltaje tiene un gran impacto en la elección de motores y hélices. El motor tratará de girar más rápido si se le aplica un voltaje mayor, y por tanto extraerá más corriente de la batería. Debes ser consciente de la relación entre el empuje generado por tus motores y la corriente consumida. Cuando conoces la corriente consumida por tu combinación de motor / hélice puedes escoger los ESCs para tu dron.
Cuando seleccionas motores, normalmente vienen acompañados de un cuadro de especificaciones proporcionados por el fabricante o el distribuidor. Deberías poder encontrar información acerca de la potencia, el empuje, las RPM, etc.
 Este es un ejemplo de el motor Micro Brushless Outrunner (10g) 18-11 2000KV:
Este es un ejemplo de el motor Micro Brushless Outrunner (10g) 18-11 2000KV:
- Modelo – 1811-2000
- KV(rpm/V) – 2000
- Peso (g) – 10 (con los cables)
- Intensidad máxima (A) – 5.5
- Resistencia (m) – 0
- Voltaje máximo (V) – 7
- Potencia (W) – 0
- Eje A (mm) – 2
- Longitud B (mm) – 22
- Diámetro C (mm) – 18
- Longitud del eje D (mm) – 7
- Longitud Total E (mm) – 30
- Hélice sugerida – 7 x 5
- Corriente sin carga – 0,4 A
- Empuje – 130g a 5000 RPM
- Velocidad sin carga a 7.4 V – 15000 RPM
El peso del motor
Una cosa que se suele obviar es el peso del motor, que es un aspecto muy importante, especialmente para las carreras y también para hacer acrobacias.
Puesto que los motores están montados en las cuatro esquinas del chasis, tienen una fuerte influencia en la respuesta del dron. Los motores más pesados incrementan el momento de inercia del conjunto, esto significa que los motores deben trabajar más duro para hacer girar el aparato.
En la práctica, cuando tu quad realiza rizos y toneles, le lleva tiempo adquirir la aceleración angular necesaria, moverse hasta la posición deseada y los motores más pesados hacen que el aparato necesite más tiempo para adquirir la velocidad angular necesaria, y también más tiempo para parar, por lo que se pueden percibir como si los motores tuvieran menos respuesta.
El motor en sí tiene su propio momento de inercia (el eje y la campana) puesto que funciona girando. Cuanto más pesado el motor, más par necesita para girar, por lo tanto necesita más tiempo para cambiar de RPMs. Esto afecta a la respuesta del motor y consecuentemente a las características del quad como conjunto. Este retraso al cambiar de RPMs hace que el quad se sienta menos preciso y que el controlador PID tenga que trabajar más duro.
Tenemos motor para dron



